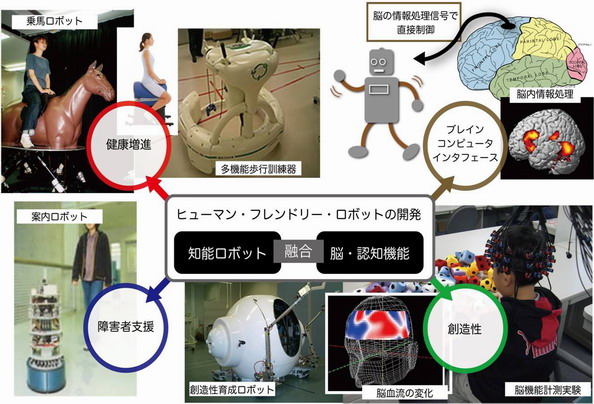
高知工科大学 知能ロボティクス研究室 単なる信号の流れだけを議論している従来の制御工学ではなく、エネルギーの流れと感性概念をも扱える新しい制御工学を構築し、その知能型ヒューマン・フレンドリーロボットへ の適用を研究しています
距離型ファジィ推論法の体系化
医療・福祉介護ロボットの安全制御法
離散情報に基づく移動ロボットの動知能化
脳内高次認知機能に関する基礎研究
生体情報フィードバック制御系の設計法
ゴムストリング型連想記憶アルゴリズム
学習誤差を指定できる高速学習アルゴリズム
ロボットとマンガを融合した創造性育成法
知能模範型ロボットの経路生成と軌道計画法
ホームドクターシステムの開発
研究設備
建設資材自動搬送ロボットシステム
農作業支援ロボットシステム
全方向移動可能な歩行訓練機
健康増進用4足乗馬ロボットシステム
健康増進機能を有する知能電動車椅子
マッサージロボットシステム
自律型案内ロボット
無方向指向性ロボット
多形態ロボットシステム