福祉介護ロボット・自律型案内ロボット・無方向指向性ロボット・多形態ロボット研究設備
研究設備
建設資材自動搬送ロボットシステム
農業作業支援ロボットシステム
健康増進用4足乗馬ロボットシステム
健康増進機能を有する知能電動車椅子
マッサージロボットシステム
自律型案内ロボット
全方向移動可能な歩行訓練機
無方向指向性ロボット
多形態ロボットシステム
研究設備
光・トポグラフィ脳測定装置(NIRS-7100)
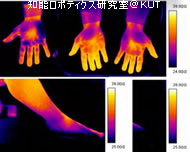
サーモングラフィーバイオ体温測定システム
顕微鏡
立型ミニマシンニング・センター
3Dステージ
アナログ・オシロスコープ(50MHzまで)
アナログ・オシロスコープ(150MHzまで)
デジタル・オシロスコープ
マニピュレータ
マッサージ・ロボット
マッサージ・パット
健康増進を目的とするパラレル式乗馬ロボット
等身大四足乗馬ロボット
ミニ四足馬型ロボット
ジョーバ1号機
ミニ・ソファーとして使用可能
行動知能模倣型全方向移動ロボット
両輪独立駆動全方向移動ロボット
三輪独立駆動全方向移動ロボット
全方向電動車椅子1号機
全方向電動車椅子2号機
全方向電動車椅子3号機
全方向移動型歩行訓練機1号機
全方向移動型歩行訓練機2号機
全方向移動型歩行訓練機3号機
全方向移動型歩行訓練機4号機
創造性育成を目的とするUFOロボット
案内ロボット
転倒概念を無くした無方向性ロボット(4号機)
転倒概念を無くした無方向性ロボット(8号機)
転倒概念を無くした無方向性ロボット(9号機)
転倒概念を無くした無方向性ロボット(10号機)
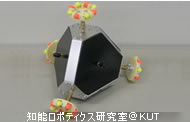
複雑な環境に適応できる多形態型ロボット
研究タイトル
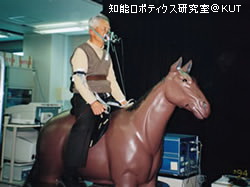
健康増進用4足乗馬ロボットシステム
研究スタッフ
研究責任者:
王 碩玉
研究背景
乗馬によるリハビリテーションはイギリスをはじめヨーロッパでは理学療法士によく使われている。しかし、場所の確保、馬の飼養などで高額な費用を必要とする。我々研究グループは乗馬ロボットを用いて、実際に大学生9名6ヶ月、後期高齢者20名3ヶ月の健康増進臨床実験を行った。医科大学にて精密検査結果により、大学生は80%、後期高齢者は100%の健康増進効果があると認められた。今後、より実環境中で乗馬するために、現在4足歩行できる乗馬ロボットを開発している。 世界で初めて乗馬の定量解析を行い、商品化までに果たした。
研究タイトル
健康増進機能を有する全方向移動型知能電動車椅子
研究スタッフ
研究責任者:
王 碩玉
研究背景
すでに歩行機能を失った高齢者・障害者にさらに腰にも障害が起こると、車椅子さえにも乗れない寝たきり状態に追い込まれてしまい、家庭と社会に負担を掛ける。しかし、歩けないため、上半身を鍛える運動方法が制限されている。そのためには、単なる移動手段としてではなく、電動車椅子そのものに健康増進機能のあることが望まれる。よって、我々が健康増進機能を有する、室内外の両方とも使える全方向移動可能な電動車椅子を開発している。電動車椅子に健康増進機能を備えるという概念は本研究により、世界で初めて提案されている。
研究タイトル
マッサージロボットシステム
研究スタッフ
研究責任者:
王 碩玉
研究背景
物理的な健康増進法の一つであるマッサージの有効性が医学的に確認されているが、医学的ノーハウを持っている者は非常に少ない。一方、簡単なマッサージ装置は販売されているが、プロのように位置や圧力などを柔らかく自動調節することができないので、その効果には限界がある。本研究では、人間の感情や生理的状態などを動的にセンスし、それに従って積極的に反応し動作を変えていくマッサージロボットを開発することを目的としている。
自律型案内ロボット
研究タイトル
自律型案内ロボット
研究スタッフ
研究責任者:
王 碩玉
研究背景
案内ロボットが人間と同じ物理空間で活躍するので、精度よく素早く物を運ぶ産業用ロボットと違って、如何に案内ロボットと人間の相互関係を定量化するか、そして如何に案内役の知識を表現するかが中心課題となっている。本研究では、距離型ファジィ推論法を利用して、人間と案内ロボットとの相互関係に見られる心理的評価に基づいて経路と軌道の計画法について研究している。
研究タイトル
全方向移動可能な歩行訓練機
研究スタッフ
研究責任者:
王 碩玉
研究背景
歩行は平坦路における2足直立歩行として単純化、モデル化されることが多いが、歩行障害を身体の機能面での障害として捉えれば、前方向だけではなく、横歩き、後歩き、方向変換などいくつかの基本動作の組み合わせからなる複雑な動作群を考慮しなければならない。本研究は全方向移動可能な、かつ転倒する事なく安全な歩行訓練機を開発し、臨床実験を行うことを目的としている。本研究では初めて動輪で全方向機能歩行訓練機を実現している。
研究タイトル
無方向指向性ロボット
研究スタッフ
研究責任者:
王 碩玉
研究背景
極限作業ロボット、レスキューロボット、宇宙ロボットなどが厳しい環境下での確実な動作が求められている。しかし、これらのロボットは移動する地形が複雑であるため、必然的にロボットは倒れやすくなり、移動機能が働かなくなる恐れがある。原因としてはそのロボット自体に前後左右の方向性の概念があるからだと考えられる。故にロボットから方向性の概念を取り除いてやると倒れるといった概念自体がなくなり、その移動能力が失われるということがなくなる。このような観点から、瓦礫上のような極限環境下で活躍するロボットを実現するために、方向性のないロボットを提案し、機構および制御法に関する基礎研究を行う 。
研究タイトル
多形態ロボットシステム
研究スタッフ
研究責任者:
王 碩玉
研究背景
従来のロボットは、単体で高機能、高精度を設計目標とされ、設計段階で目的とされる仕事や動作が決定されてきた。そのため一定の環境下では高性能に動作するが環境の変化や不測の事態に対応できないというデメリットをもっている。そこでロボットを個々の結合・分離可能なモジュールに分割し、その組み合わせによって環境の変化に対応させるという考え方が研究されている。さまざまな形状が模索されているが未だに有効かつ実用的な案は不完全である。本研究では新しい形状のモジュールを提案し、その有効性を確認することを目的とする。ここでは、モジュールロボットのコンセプトとしては、モジュールロボットシステムは低度の自律機能を有するモジュールロボットの結合からなるロボット群であり、周囲の環境に合わせて形態を変化させながら移動したり作業を行ったりすることができる。これを自己組み立てと呼ぶ。また、各モジュールを均質化にすることにより一部が故障した場合に他のモジュールを用いて故障箇所を補うことができる。これを自己修復と呼ぶ。このことにより耐環境性、耐故障性にすぐれていると考えられる。
movie
研究タイトル
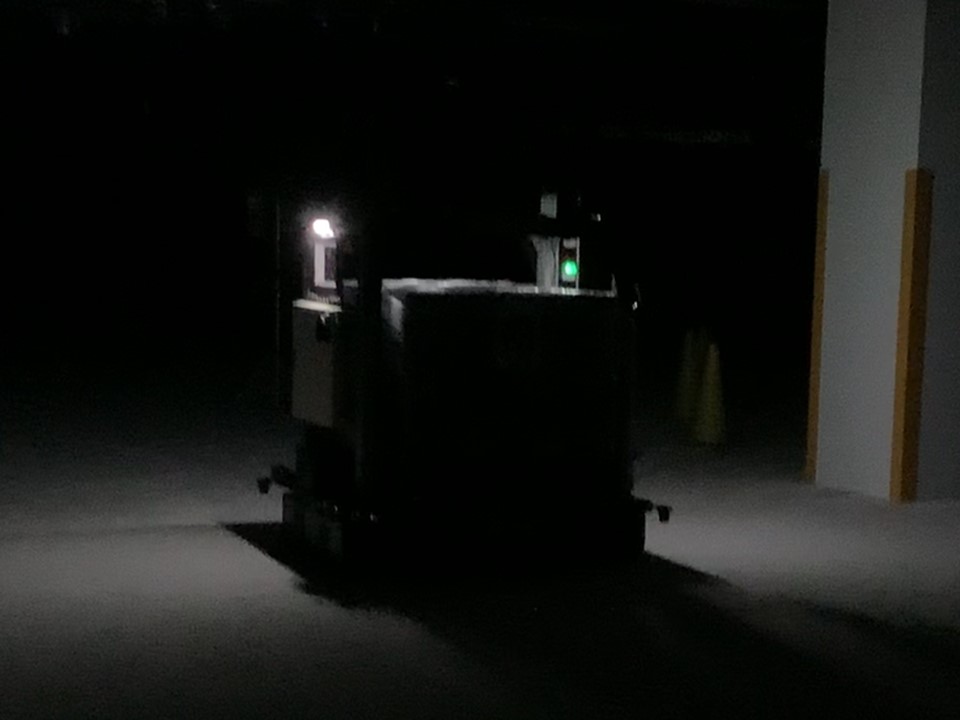
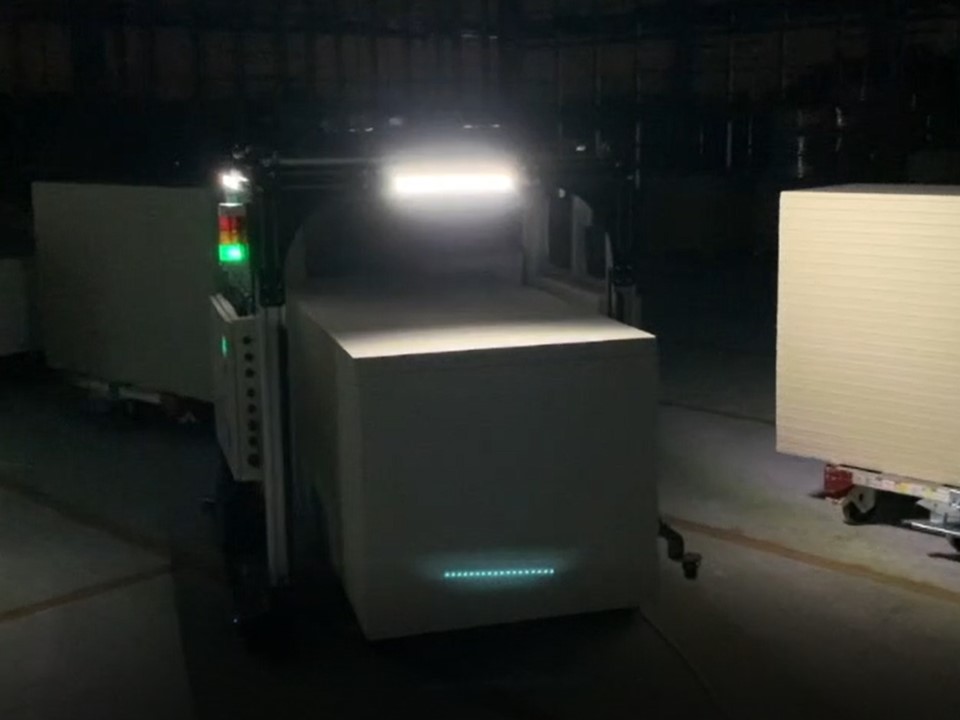
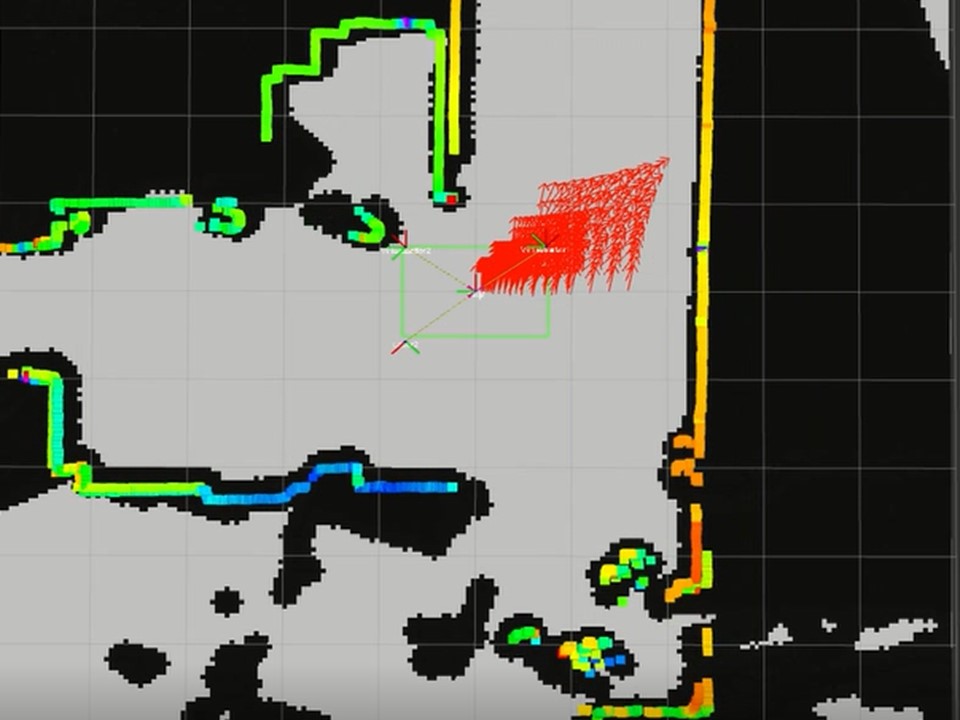
建設資機材自動搬送ロボット
研究スタッフ
研究責任者:
王 碩玉
研究背景
深刻な作業員不足に悩む建設業では、ロボットによる自動化・省力化が急務である。その中でも重労働かつ単純作業である資機材搬送作業の自動化(無人化)は、ニーズも多く研究開発が進められています。しかし、整理整頓の比較的容易な工場内や物流倉庫における資材搬送と異なり、内装工事現場の複雑さや、日々変化する現場環境、安全性確保などの問題のため、完全な自動化が困難であるとされてきた。本学と前田建設工業、有限会社サット・システムズ(本社高知県)が、資機材自動搬送ロボットを共同開発し、夜間での資機材自動搬送を実現した。今後は作業所への導入を推進するとともに、長尺物や重量物の搬送も実現できるよう改良を重ねてまいります。