福祉介護ロボット・自律型案内ロボット・無方向指向性ロボット・多形態ロボット研究設備
研究設備
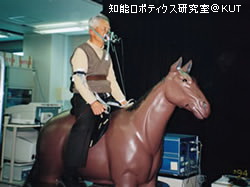
健康増進用4足乗馬机器人系统
有健康增进机能的智能电动车椅子
按摩机器人系统
自主导引机器人
可全方向移动的步行训练机
无方向性机器人
多形态机器人系统
研究设备
光-表面人脑检测设备(NIRS-7100)
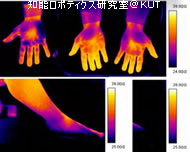
摄影式人体温度检测系统
显微镜
立式迷你加工中心
3D平台
模拟示波器(高达50MHz)
模拟示波器(高达150MHz)
数字示波器
机械臂
按摩机器人
按摩垫
健康增进为目的的乘马机器人
与马等身的四组机器人
小型四足马机器人
乘马一号机
可做迷你沙发
移动智能模拟全方向机器人
两轮独立驱动全方向机器人
三轮独立驱动全方向机器人
全方向电动车椅子一号机
全方向电动车椅子二号机
全方向电动车椅子三号机
全方向移动型步行训练机一号机
全方向移动型步行训练机二号机
全方向移动型步行训练机三号机
全方向移动型步行训练机四号机
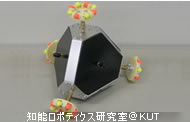
创造性育成为目的的UFO机器人
引导机器人
无颠倒概念的无方向机器人(4号机)
无颠倒概念的无方向机器人(8号机)
无颠倒概念的无方向机器人(9号机)
无颠倒概念的无方向机器人(10号机)
应对复杂环境的多形态机器人
研究题目
健康促进的四足骑乘机器人
研究人员
研究責任者:
王 硕玉
研究背景
乘马治疗在世界范围内已经广泛被理疗师使用。但是乘马疗法由于场地,马的饲养等问题,导致治疗成本非常高。我们的研究期望通过机器人代替马,实现乘马疗法。9名大学生6个月的实验,和后期老年人20人的3个月健康促进实验已经完成。从医科大学精密的检测结果可以看出,80%的大学生,100%的后期高龄者都得到了增进健康的效果。今后,还会做定量的实验,直到商品化为止。
研究题目
健康增进机能的全方向移动型电动车椅子
研究人员
研究責任者:
王 硕玉
研究背景
对于失去步行能力的老年人,腰部的损伤会接踵而至,这将导致最终的卧床不起,给家庭和社会带来负担。由于不能步行,上半身的锻炼运动也受到限制。为此,采用特殊的移动方式,电动车椅子有望成为健康增进的器械。通过电动椅子对健康进行增进的概念是我实验在世界首先提出的。
研究题目
按摩机器人系统
研究成员
研究責任者:
王 硕玉
研究背景
物理的健康增进方法——按摩的有效性已经得到了医学上的确认,但是拥有该医学知识的人非常少。一方面,简单的按摩机器正在销售中,然而可以自动调节位置、压力、柔软性的按摩机械却没有,因次限定了按摩的效果。本研究以通过感知人类的情感和生理状态,采用积极的方法调节按摩的动作的机器人的开发为目的进行研究。
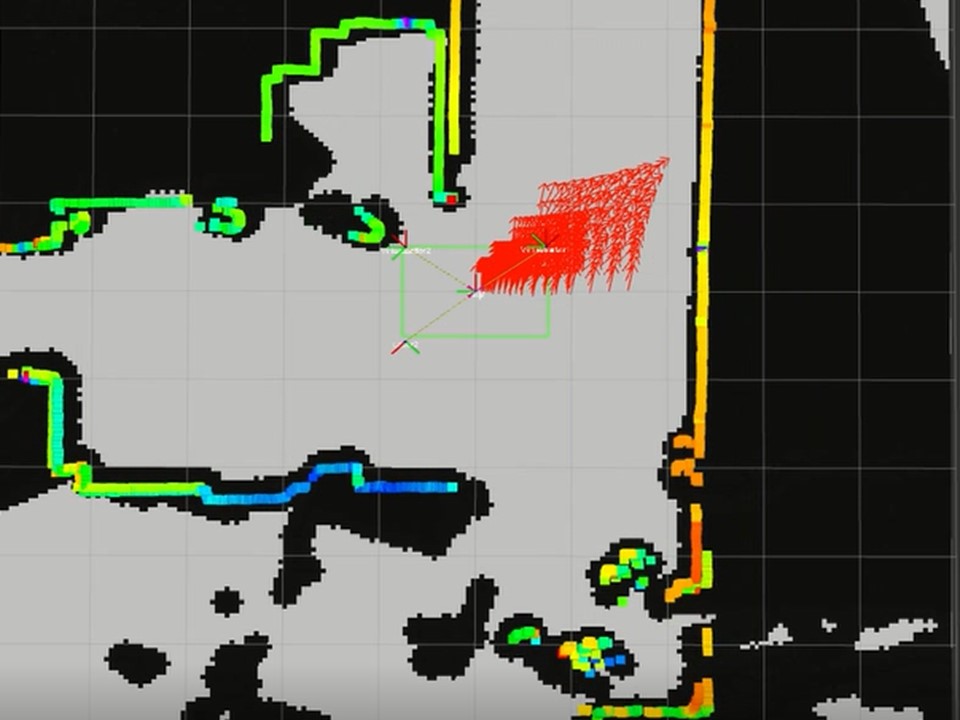
自主型导引机器人
研究题目
自主型导引机器人
研究人员
研究責任者:
王 硕玉
研究背景
导引机器人是和人类存在于同一空间的机器人,与高精度的运送工业机器人不同,如何能够使导引机器人和人类的关系被定量化,如何提供导引知识成为展开研究的中心课题而。本研究,利用距离型模糊推论方法,基于人类与导引机器人相互关系,对跟踪人类径路并进行轨道计划的方法进行研究。
研究题目
可全方向移动的步行训练机
研究人员
研究責任者:
王 硕玉
研究背景
将步行在平坦道路上的2足直立步行进行单纯化,模型化的方法有很多,为恢复步行障碍对身体机能的损害,不止是向前移动,横向移动,后退,转向等基本动作的组合也应该被考虑用于复杂动作而提高恢复效果。本研究以防止跌倒进行安全的全方向移动的步行训练机开发为目的,并通过临床实验验证训练效果。本研究开启了轮式全方向移动步行训练机的先河。
研究题目
无方向型机器人
研究人员
研究責任者:
王 硕玉
研究背景
在极端的环境中工作的机器人,如救援机器人,宇宙机器人等运行在恶劣的环境中,因为要移动的地形很复杂,这些机器人有可能因为反倒而无法正常工作。 因此从去除正反的概念出发,我们提出了一种机器人非定向 ,实现了机器人在极端环境如瓦砾上的工作,并对控制方法和机制的基础开展了研究。
电影
研究题目
多态机器人系统
研究人员
研究責任者:
王 硕玉
研究背景
传统的机器人,以单体机能最高,精度最高位目标设计,设计阶段就已经确定了所有的动作。为此在确定环境下高性能的动作反而对无法预测环境来说是一种劣势。为了应对这一问题,将机器人划分成多个模块,通过组合来应对环境的变化是我们的想法。模块机器人的概念,模块机器人的较低的自理机能,能够相互结合组成群体,对周围的环境变化具有适应性进而实现移动作业。同时,各个部件的匀质化,可以在发生故障时相互替代,修复自己的机能。相比环境的耐受性,耐故障行也需要被考虑。