Research Background
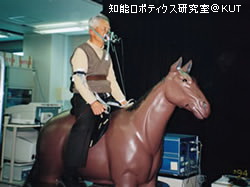
Horseback riding rehabilitation is often used by physiotherapists in the UK and other parts of Europe. However, securing space and raising the horses are expensive. Our research group used a horseback riding robot to conduct a clinical experiment on health promotion for 9 university students for 6 months and 20 elderly people for 3 months. The results of detailed examinations at the medical university confirmed that the robot had a health promotion effect of 80% for the university students and 100% for the elderly people. In order to ride horses in a more realistic environment, we are currently developing a horseback riding robot that can walk on four legs. We were the first in the world to conduct a quantitative analysis of horseback riding and achieve commercialization.
Research Title
Intelligent Electric Wheelchair with Health Promotion Function
Research Background
If elderly or disabled people who have already lost the ability to walk also develop back problems, they are forced into a bedridden state where they cannot even use a wheelchair, placing a burden on the family and society. However, because they cannot walk, the methods of exercising the upper body are limited. To that end, it is desirable for the electric wheelchair itself to have health-promoting functions, rather than simply being a means of transportation. Therefore, we are developing an omnidirectional electric wheelchair with health-promoting functions that can be used both indoors and outdoors. The concept of equipping an electric wheelchair with health-promoting functions is proposed for the first time in the world through this research.
Research Background
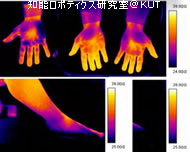
The effectiveness of massage, one of the physical health promotion methods, has been medically confirmed, but very few people have the medical know-how. On the other hand, simple massage devices are available on the market, but they cannot automatically adjust the position and pressure gently like a professional, so their effectiveness is limited. The purpose of this research is to develop a massage robot that can dynamically sense human emotions and physiological states, and actively respond and change its movements accordingly.
Research Background
Guide robots operate in the same physical space as humans, and unlike industrial robots that transport objects quickly and precisely, the main issues are how to quantify the interaction between guide robots and humans, and how to represent the knowledge of the guide. In this research, we use a distance-type fuzzy reasoning method to study route and trajectory planning methods based on psychological evaluations of the interaction between humans and guide robots.
Research Title
Omni-directional Mobile Walking Training Robot
Research Background
Walking is often simplified and modeled as walking upright on two legs on a flat road, but if walking disorders are considered as disorders of the body's functions, complex movements consisting of a combination of several basic movements such as walking sideways, walking backwards, and changing direction must be considered in addition to walking forward. The purpose of this research is to develop a safe walking training machine that can move in all directions and does not fall over, and to conduct clinical experiments. In this research, we have realized an omnidirectional functional walking training machine with moving wheels for the first time.
Research Background
Extreme work robots, rescue robots, space robots, and other robots are required to operate reliably in harsh environments. However, because the terrain on which these robots move is complex, they inevitably tend to fall over and there is a risk that their mobility function will stop working. This is thought to be because the robot itself has a concept of directionality - forward, backward, left and right. Therefore, if the concept of directionality is removed from the robot, the concept of falling over itself will disappear, and the robot will not lose its mobility. From this perspective, in order to realize a robot that can function in extreme environments such as on rubble, we propose a robot with no directionality and conduct basic research on its mechanism and control method.
Research Background
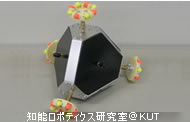
Conventional robots are designed to be highly functional and highly accurate, and the tasks and actions they perform are determined at the design stage. As a result, they perform highly efficiently in a certain environment, but have the disadvantage of being unable to respond to environmental changes or unexpected situations. Therefore, the idea of dividing a robot into individual modules that can be combined or separated, and combining them to respond to environmental changes, is being studied. Various shapes have been explored, but effective and practical proposals are still incomplete. In this study, the aim is to propose a new type of module and confirm its effectiveness. Here, the concept of modular robots is that a modular robot system is a group of robots consisting of modular robots with low levels of autonomous functions, and can move and perform tasks while changing their form according to the surrounding environment. This is called self-assembly. In addition, by homogenizing each module, if one part breaks down, other modules can be used to compensate for the broken part. This is called self-repair. This is thought to give the robot excellent environmental resistance and fault tolerance.
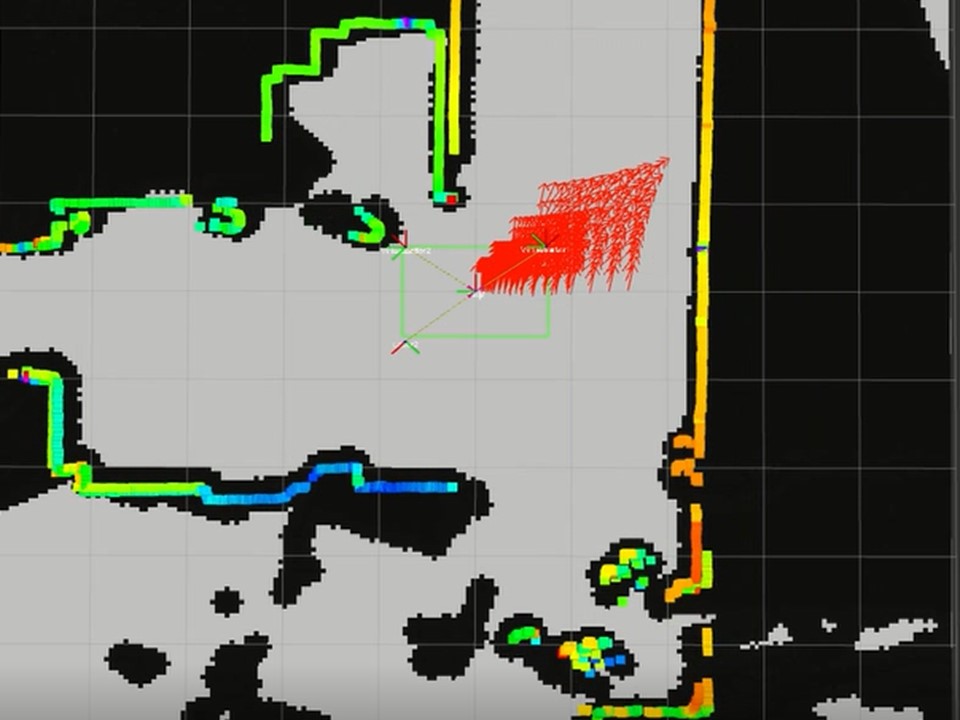
Research Background
In the construction industry, which is suffering from a serious labor shortage, automation and labor saving using robots are urgently needed. There is a high demand for automation (unmanned) of heavy and simple material transportation work, and research and development is being conducted. However, unlike material transportation in factories and logistics warehouses, which are relatively easy to organize, complete automation has been considered difficult due to the complexity of interior construction sites, the daily changing site environment, and issues such as ensuring safety. Our university, Maeda Construction, and Sat Systems Co., Ltd. (headquartered in Kochi Prefecture) have jointly developed an automatic material transportation robot and have realized automatic material transportation at night. In the future, we will promote its introduction to work sites and continue to make improvements so that it can also transport long and heavy objects.