 |
2026.3.18
Congratulations on your graduation to four MC student, four BC students! |
|
2026.2.27
We held a farewell party |
|
2025.12.22
As usual, we did the year-end cleanup of the laboratory. |
|
2025.12.17
We held a welcome party for third-year undergraduates. |
|
2025.12.17
Third-year undergraduate students held a robot battle. |
|
2025.12.9
Professor Wang gave a lecture at the 98th term of the Kochi Citizens' University. |
|
2025.8.2-3
Open Campus was held on August 2 and 3.
|
|
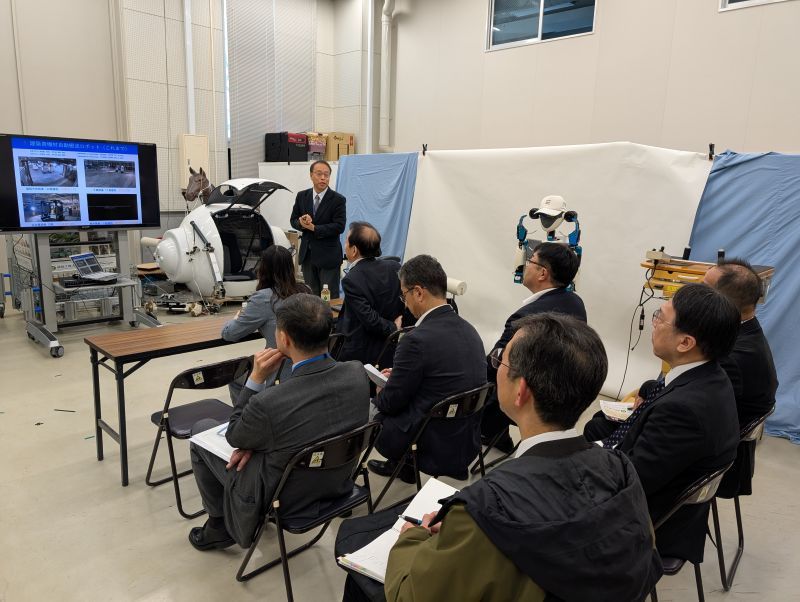
2025.3.21
Representatives from Kyocera Corporation and Kochi Prefecture visited our laboratory. |
|
2025.3.18
Congratulations on your graduation to four MC student, four BC students! |
|
2025.2.27
We held a farewell party |
|
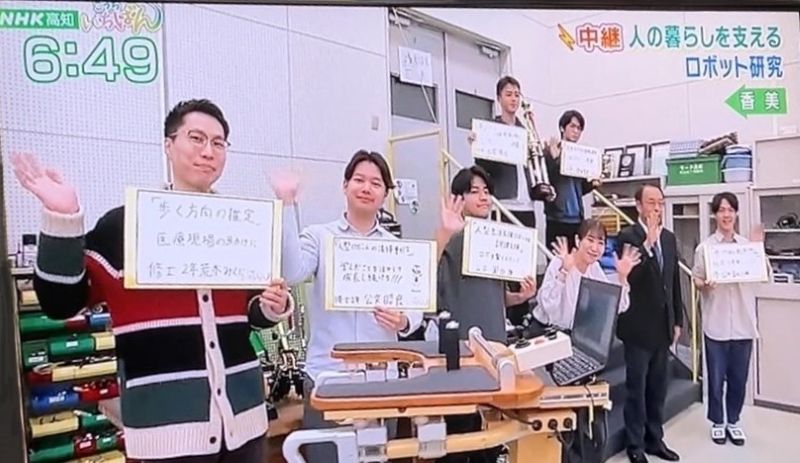
2025.2.12
Our laboratory was featured on the NHK live broadcast "Kouchi Ichiban" |
|
2025.2.7
Professor Wang gave a speech at "SIer's Day in Shikoku (Kochi)" hosted by the Japan Robot System Integrator Association. |
|
2024.12.24
We carried out our traditional end-of-year cleaning of the lab.
|
|
2024.11.27
Professor Yang Guang, a lecturer at Osaka Institute of Technology, gave a lecture. |
|
2024.11.8
Third-year undergraduate students had a robot showdown. |
|
2024.8.20
The 2024 Robot Idea Koshien Shikoku Tournament was held. |
|
2024.8.3-4
Open Campus was held on August 3 and 4.
|
|
2024.3.18
Congratulations on your graduation to two MC student, four BC students! |
|
2024.3.12
held a farewell party |
|
2023.11
Third-year undergraduate students had a robot showdown. |
|
2023.11.9-11
We will exhibit at MONO MESSE KOCHI 2023 held in Kochi Jibasan Center (Kochi-prefecture). |
|
2023.9.20
Regional Cooperation Seminar 2023 will be held. |
|
2023.8.29
Professor Wang gave a lecture at ICICIC2023. |
|
2023.8.5-6
Open Campus was held on August 5 and 6.
|
|
2023.8.2
The 2023 Robot Idea Koshien Shikoku Tournament was held. |
|
2023.7.21
"Robot Tour 2023 -What is Robot?" will be held at Kami Campus. |
|
2023.3.17
Mikuni Araki (B4) received the Eiji Mutoh Excellent Student Award of Japan Society for Design Engineering. |
|
2023.3.17
Congratulations on your graduation to one DC student, one MC student and four BC students! |
|
2022.12
We provided a report under a theme of "Development of Work Support Robot realizing Lavor-saving in Agricultural Work" at KUT IoP Promotion Center Research Results Briefing. |
|
2022.12
Third-year undergraduate students had a robot showdown. |
|
2022.9
Guang Yang received the Best Presentation Award at an international conference. |
|
2022.11.10-12
We will exhibit at MONO MESSE KOCHI 2022.
|
|
2022.10.26-28
We will exhibit at Agribusiness Creation Fair 2022.
|
|
2022.9.1-2
Annual summer laboratory big cleanup was held.
|
|
2022.7.30-31
Open Campus was held from July 30th to 31st. We are sorry for the students who were unable to enter the room because of a limit of four students at a time due to COVID-19.
|
|
202.3.17
Masashi Kawajiri (B4) received the Excellent Presentation Award at Japan Society of Mechanical Engineers Chugoku-Shikoku Branch Student Association, 2021. |
|
2022.3.17
Rikushi Oga (B4) received the Best Presentation Award at the graduation research presentation. |
|
2022.3.17
Congratulations on your graduation to three MC students and three BC students! |
|
2021.9
Third-year undergraduate students had a robot showdown. |
|
2021.9
Guang Yang and Professor WANG received the Best Paper Award at an international conference. |
|
2021.9
Professor WANG was awarded the title of "Fellow" by the Robotics Society of Japan. |
|
2021.7
Our laboratory was introduced in a journal of Japan Robot Association. |
|
2021.4
An interview article of our laboratory appeared in VIEW next. |
|
2021.4
An interview article of Professor WANG appeared in KUT public relations magazine. |
|
2021.3.18
Tomoka Konoo (B4) received the Eiji Mutoh Excellent Student Award of Japan Society for Design Engineering. |
|
2021.3.18
Congratulations on your graduation to one DC student, one MC student and five BC students! |
|
2021.3.9
Guang Yang received the Society of Life Support Engineering Encouragement Award. |
|
2020.12.18
Guang Yang received the ISIKM2020 Best Presentation Award. |
|
2020.9.24
D3 Guang Yang received the Sakuma Award. |
|
2020.6
We have succeeded in an on-site inspection experiment of our construction robot. |
|
2020.1.14
Alumni Yuushi Matsubara and Masaki Iwamatsu, now working at MAKITA Corporation visited us. |
|
2019.3.26
Rika Miyao (M2) received the Young Fellow Award for Outstanding Presentation at the 57th General/Lecture Meeting of JSME Chugoku-Shikoku Branch. |
|
2019.3.25
Hongbin Chang (D3) received the Sakuma Award. |
|
2019.3.25
Yuki Fukumoto (M2) received the Sakuma Award. |
|
2018.8.7
Prof. Shuoyu WANG was elected as an honorary member of BMFSA. |
|
2018.8.25
D3 Hongbin Chang won IEEE ISR 2018 Best Student Paper Award |
|
2018.8.7
Bo Shen IEEE ICMA 2018 Best Paper Award in Automation |
|
2018.8.7
Bo Shen IEEE ICMA 2018 Best Paper Finalist |
|
2018.7.18
Investigation at Kachouchuuou Hospital. |
|
2018.3.6
Undergraduate Miho Ichihashi received the Excellent Presentation Award of 2017 JSME Chugoku-Shikoku Branch Students Association. |
|
2017.11.25
Professor Shuoyu WANG received the BMFSA 2017 Contribution Award. |
|
2017.11.25
Bo Shen received the BMFSA 2017 Devotement Award. |
|
2017.08.29
Yina WANG received the ICICIC 2017 Best Paper Award. |
|
2017.03.24
Undergraduate Yuuki Fukumoto received the Suematsu Award of KUT and Hatakeyama Award of Japan Society of Mechanical Engineers. |
|
2017.03.24
Undergraduate Yuutarou Morimoto received the Eiji Mutoh Award of Japan Society for Design Engineering. |
|
2015.12.8
Doctoral student Bo SHEN received the Finalist of Best Student Paper Award from IEEE ROBIO. |
|
2015.11.21
Master's student Yuji KARINO received the Student Encouragement Award from Biomedical Fuzzy Systems Association. |
|
2014.8.26
Symposium on Frontier Technologies for Rehabilitation Robotics (SRR2014), Shenyang, Aug. 26, 2014.
|
|
2014.3.20,
Doctoral student Yina WANG received the Academic Research Encouragement Award from Kochi University of Technology. |
|
2014.8.26,
Doctoral degree student Yina WANG received the Encouragement Award from The Society of Life Support Engineering.
|
|
2014.3.20,
Lecturer Yinlai JIANG received the Encouragement Award from Japan Society for Fuzzy Theory and Intelligent Informatics. |
|
2014.2.28,
2nd year master's student Yuto WATANABE received the Academic Research Encouragement Award from Kochi University of Technology. |
|
2013.9.10,
Lecturer Yinlai JIANG received the SCIS-ISIS 2012 Best Application Award. |
|
2013.3.18,
Doctoral student Renpeng TAN received the Academic Research Encouragement Award from Kochi University of Technology. |
|
2012.11.22,
Lecturer Yinlai JIANG won the SCIS-ISIS 2012 Best Application Award. |
|
2012.9.28,
Doctorl program student Renpeng TAN won an academic research encouragement award from Kochi University of Technology. |
|
2012.8.20,
CONTENTS of "Contributions" and "Presentations" are added. |
|
2011.9.9,
16th Intelligent Mechatronics Workshop was held at Kochi University of Technology on September 2-3, 2011. |
|
2011.2.22,
Senior undergraduate student Yuto WATANABE was selected as a representative of the graduation ceremony. |
|
2011.1.17,
We released our control software of Akita Kanto. |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}