English
中文
教授
助教
大学院
学部生
過去スタッフ
方針
制御基礎
制御工学Ⅰ
制御工学Ⅱ
ロボット工学概論
知能ロボット工学
制御工学特論
基礎実験
セミナー
総合化授業
成果報告会
ロボット対決
理論構築
距離型ファジィ推論法の体系化
医療・福祉介護ロボットの安全制御法
離散情報に基づく移動ロボットの動知能化
脳内高次認知機能に関する基礎研究
生態情報フィードバック制御系の設計法
ゴムストリング型連想記憶アルゴリズム
学習誤差を指定できる高速学習アルゴリズム
ロボットとマンガを融合した創造性育成法
知能模範型ロボットの経路生成と軌道計画法
ホームドクターシステムの開発
システム開発
研究設備
建設資材自動搬送ロボットシステム
農作業支援ロボットシステム
全方向移動可能な歩行訓練機
健康増進用4足乗馬ロボットシステム
健康増進機能を有する知能電動車椅子
マッサージロボットシステム
自律型案内ロボット
無方向指向性ロボット
多形態ロボットシステム
これまでの研究の成果から様々な賞を授賞いたしました。これまでの、授賞を励みに一生懸命頑張っていきたいと思います。
研究室では,推論エンジンや在宅管理システムなどソフトウェアが幾つか出来上がっております。
ヒューマン推論エンジン
知能型ヒューマン・フレンドリーロボットへ の適用を研究していくことで、公共・医療・福祉、そして生活等、幅広い分野への社会貢献へと繋がると考えています。
学会発表
お花見
忘年会
卒業・修了お祝い
2024.3.18
MC2名、BC4名、卒業おめでとう!
2024.3.12
送別会を行いました
2023.11
学部3年生がロボット対決を行いました
2023.11.9-11
高知ぢばさんセンター(高知市)で開催される「ものメッセKOCHI2023 第12回高知県ものづくり総 合技術展」に出展いたします
2023.9.20
地域連携セミナー2023が開催されます
2023.8.5-6
8月5・6日にオープンキャンパスを行いました。
2023.7.21
香美キャンパスで「ロボットって何?セミナー&見学会2023」が開催されます
2023.3.17
B4の荒木みくにさんは、日本設計工学会武藤栄次賞優秀学生賞を受賞した
2023.3.17
DC1名、MC1名、BC4名、卒業おめでとう!
2022.12
「農作業の省力化を実現する作業支援ロボットの開発」をテーマに高知工科大学IoP推進センター研究成果報告会にて報告を行いました
2022.12
学部3年生がロボット対決を行いました
2022.9
楊は国際学会にてベストプレゼン賞を受賞した
2022.11.10-12
ものメッセKOCHI2022に出展します。
2022.10.26-28
アグリビジネス創出フェア2022に出展します。
2022.9.1-2
毎年恒例、研究室の夏の大掃除を行いました。
2022.7.30-31
7月30日~31日にオープンキャンパスを行いました。 COVID-19のことで、今回4人まで/1回との制限を設けられたので、入室できなかった学生には申し訳ございませんでした。
2022.3.17
B4の川尻将司さんは、2021年度日本機械学会中四国学生会にて優秀発表賞を受賞した
2022.3.17
B4の大賀陸司さんは、卒業研究発表会にてベストプレゼンテーション賞を受賞した
2022.3.17
MC3名、BC3名、卒業おめでとう!
2021.11
学部3年生がロボット対決を行いました
2021.9
楊・王は国際学会にて論文賞を受賞した
2021.9
王教授が日本ロボット学会から「フェロー」の称号を授与された
2021.7
ロボット工業会の機関誌に研究室が紹介されました
2021.4
研究室のインタビュー記事がVIEW nextに掲載されました
2021.4
王先生のインタビュー記事が高知工科大学の広報誌に掲載されました
2021.3.18
B4の此尾友花さんは、日本設計工学会武藤栄次賞優秀学生賞を受賞した
2021.3.18
DC1名、MC1名、BC5名、卒業おめでとう!
2021.3.9
楊光はライフサポート学会奨励賞を受賞した
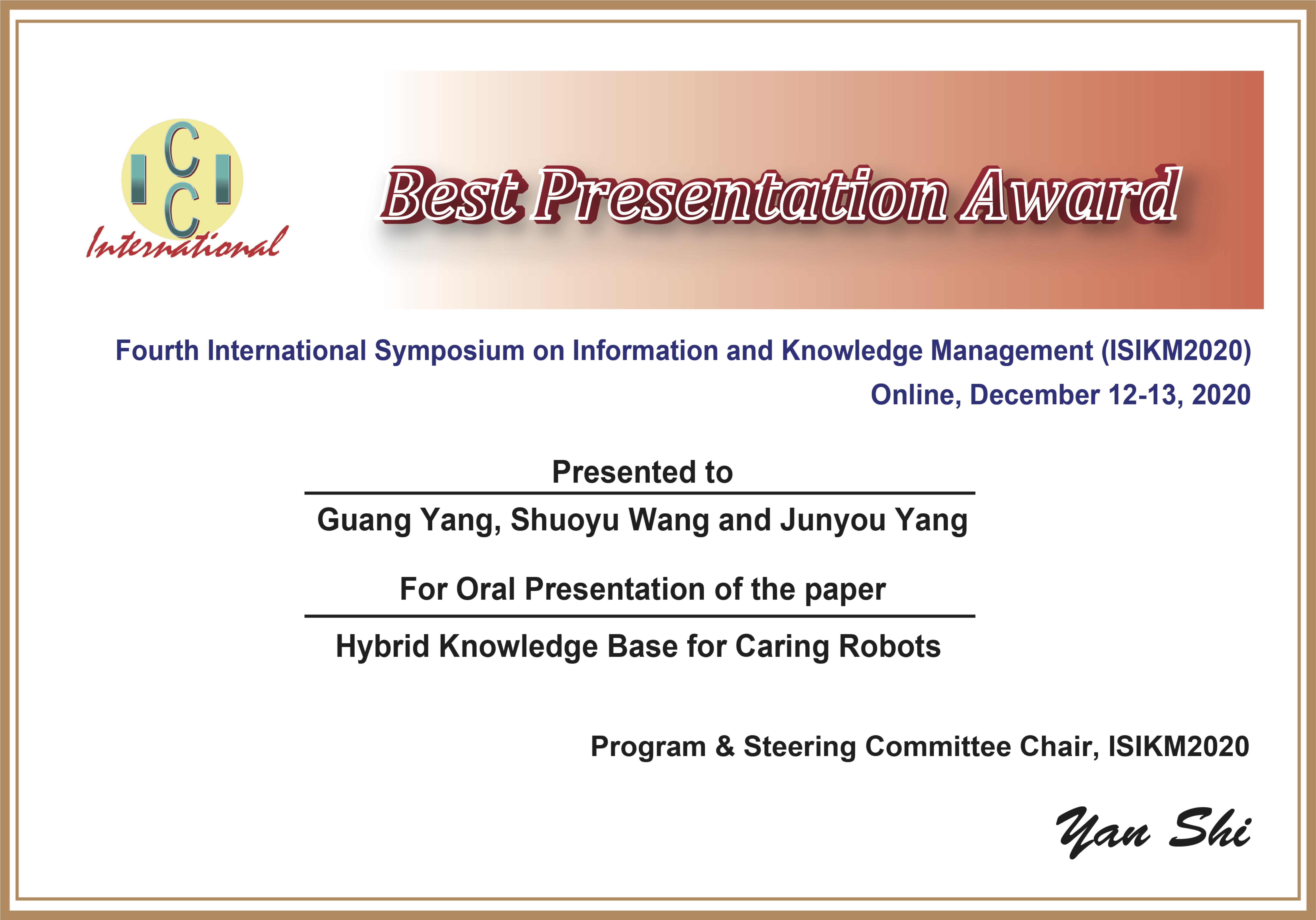
2020.12.18
楊光はISIKM2020 Best Presentation Awardを受賞した
2020.9.24
D3の楊光は佐久間賞を受賞した
2020.6
建築ロボットの現場検証実験に成功しました
2020.1.14
株式会社マキタに勤めている、松原有志君と岩松将輝君に来ていただきました
2019.3.26
M2 の宮尾怜佳さんは、日本機械学会中国四国支部 第57期総会・講演会にて、若手優秀講演フェロー賞を受賞した。
2019.3.25
D3の常洪彬は佐久間賞を受賞した
2019.3.25
M2の福本 勇樹は佐久間賞を受賞した
2018.8.7
王先生はBMFSA学会の名誉会員に選ばれました
2018.8.7
瀋博はIEEE ICMA 2018 Best Paper Finalistを受賞した
2018.7.18
香長中央病院での調査
2018.3.6
学部市橋 実歩は2017年度 日本機械学会 中国四国学生会 優秀発表賞を受賞した
2017.11.25
王 碩玉教授はBMFSA2017年度 功労賞を受賞した
2017.11.25
瀋博はBMFSA学会2017 貢献賞を受賞した
2017.08.29
王義娜はICICIC2017 Best Paper Awardを受賞した
2017.03.24
学部の福本 勇樹は日本機械学会畠山賞 本学末松賞を受賞した
2017.03.24
学部の森本 祐太郎は、日本設計工学会武藤英次賞を受賞した
2015.12.8
博士後期課程の瀋博は、IEEE ROBIO Finalist of Best Student Paper Awardを受賞した
2015.11.21
修士課程の狩野雄史は、バイオメディカル・ファジィ・システム学会 学生奨励賞を受賞した
2014.8.26
Symposium on Frontier Technologies for Rehabilitation Robotics (SRR2014),Shenyang, Aug. 26, 2014.
2014.3.20
博士後期課程の王義娜は、高知工科大学学術研究奨励賞を受賞した
2014.2.28
博士後期課程の王義娜は、ライフサポート学会奨励賞を受賞した
2013.9.10
講師の姜銀来は、知能情報ファジィ学会奨励賞を受賞した
2013.3.18
修士2年の渡辺悠人は、高知工科大学学術研究奨励賞を受賞した
2012.11.22
講師の姜銀来がSCIS-ISIS 2012 Best Application Awardを受賞した
2012.9.28
博士後期課程の譚仁鵬は、高知工科大学学術研究奨励賞を受賞した
2012.8.20
社会貢献、論文発表を追加した
2011.9.9
第16回知能メカトロニクスワークショップは、2011年9月2日(金),3日(土)高知工科大学にて開催された
2011.2.22
四年生の渡辺君は、卒業式の総代に選ばれた
2011.1.17
秋田提灯の制御ソフトを公開した
お問い合わせ
〒782-8502
高知県香美市土佐山田町宮ノ口185高知工科大学教育研究棟A A161
TEL:0887-57-2306
E-mail:wang.shuoyu
@kochi-tech.ac.jp
アクセスマップはこちら


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}